



Nachdem SKYTRAXX bekanntlich die ersten 2.0 plus und 3.0 Varios mit FANET+ für Tester ausgeliefert hat wurde nun auch das FANET+ Modul mit FLARM für weitere Variosysteme vorgestellt.
 … mit FLARM Unterstützung!
… mit FLARM Unterstützung!
Es handelt sich um ein fertiges Modul mit serieller Kommunikation.
Dieses Modul wickelt die gesamte FANET+ Kommunikation intern ab, unterstützt dabei das FANET+ typische Multi-Hopping und sendet über die serielle Schnittstelle Informationen von allen bekannten Systemen in der FANET+ Cloud.
Das Modul kann als Erweiterung eines Varios um FANET+ mit FLARM oder als Basisstation ohne FLARM eingesetzt werden.
In der Varioversion mit FANET+ und FLARM arbeitet das System als „FLARM-Boje“.
So wie auch mit den SKYTRAXX Varios 2.0 und 3.0 wird man von FLARM Empfängern gesehen, sieht diese aber selber nicht.
Da der FLARM Code nicht frei verfügbar ist handelt es sich hierbei um ein geschlossenes System.
(Auf dem Bild sieht man das System mit aufgedruckter FLARM Id)
In der Version als Bodenstation ist kein FLARM enthalten und die Firmware ist sogar open source!
Hier können aber auch schon über die vorhandene Schnittstelle FANET+ Geräte erfasst und ausgegeben werden.
Kobo-Nutzer können ihr System mit FANET+ und FLARM ausrüsten. Hier muss nur jemand die Einbindung der FANET+ Modulschnittstelle entwickeln; sollte eine Sache von ein paar Abenden im Bastelkeller bzw. PC sein.
Und natürlich können damit die ersten „echten“ FANET+ Bodenstationen entwickelt werden mit Hopping, Tracking bzw. Visualisierung im Internet und der Möglichkeit zusätzliche Informationen wie z.B. Wetterdaten zu senden.
Weitere Details können in der technischen Dokumentation nachgelesen werden.
Die Aufrüstung eines SKYTRAXX 2.0 Plus oder SKYTRAXX 3.0 auf FANET und FLARM für FANET+ ready Geräte kostet im Shop von SKYTRAXX 99,00€, somit sollte das eigentliche FANET Modul deutlich günstiger sein!
Der Preis unter 100€ ist selbst ohne FANET+ nur für eine FLARM Modul schon ein Knaller!
Ich habe von SKYTRAXX ein Modul der Vorserie zu Testzwecken erhalten und konnte hiermit einen Versuchsaufbau entwickeln.

Dieser Versuchsaufbau besteht auf folgenden Komponenten:
- FANET+ Modul mit FLARM von SKYTRAXX
- Ultimate GPS Module (G.top) von EXP-Tech
- TEENSY-LC, ebenfalls von EXP-Tech
Verschaltet nach diesem Schaltplan aus der Dokumentation von FANET+
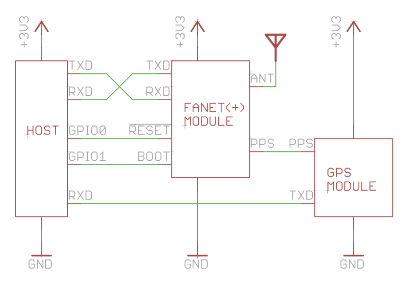
Dabei zu beachten ist, dass der TEENSY-LC über die Micro USB Buchse mit Spannung versorgt wird und an einem Pin 3,3V (100mA max.) zur Verfügung stellt. Das reicht aber vollkommen aus um die beiden Zusatzmodule FANET+ und GPS mit Spannung zu versorgen, so dass für einen mobilen Einsatz zusätzlich lediglich ein Gehäuse, eine Standard PowerBox (wie für Handys etc.), sowie eine entsprechende Antenne für das GSM Band notwendig ist. Hierdurch lässt sich ein FANET+ System mit FLARM für unter 180€ aufbauen!
Falls jemand so etwas nachbauen will hier der Quellcode der entsprechenden Arduino Entwicklungsumgebung für den TEENSY-LC
/*
* FANET Basic modul
*
* from BitBroker – Burkhard Vogt, Muenster, Westfalia, Germany
*
* Connections:
*
* Micro USB form power supply i.e. a power bank
*
* 0 – (RX1) TX from FANET modul
* 1 – (TX1) RX to FANET modul
* 9 – (RX2) TX from GPS modul
*
* Connect PPS from GPS to FANET modul!
*/
#define UsbSerial Serial
#define FntSerial Serial1
#define GpsSerial Serial2
#define POS_DELAY 20 // wait 20 position sets for first response
#define LED 13 // the number of the onboard LED pin
// #define DEBUG
// #define DEBUG_FNT
// #define DEBUG_GPS
char FntBuf[256];
byte FntIdx;
/*
* Read the FANET statup requests
* Wait max. 1 sec for answer
*/
void ReadStartup ()
{
FntIdx = 0;
// Wait 1sec for response
unsigned long ulMillis = millis() + 1000;
while ( millis() < ulMillis )
{
if ( FntSerial.available() )
{
FntBuf[FntIdx] = FntSerial.read();
if ( FntBuf[FntIdx] == 10 )
{
#ifdef DEBUG_FNT
FntBuf[FntIdx] = 0;
UsbSerial.print ( „FANET ‚“ );
UsbSerial.print ( FntBuf );
UsbSerial.println ( „‚“ );
#endif
return;
}
else
{
if ( FntBuf[0] == ‚#‘ ) FntIdx++;
if ( FntIdx > 255 ) FntIdx = 0;
}
}
}
FntBuf[0] = 0;
}
/*
* Startup sequence
* Initialize ports, FANET modul
* and some variables
*/
void setup()
{
UsbSerial.begin ( 9600 );
FntSerial.begin ( 115200 );
GpsSerial.begin ( 9600 );
#ifdef DEBUG
while ( ! UsbSerial ) { ; }
UsbSerial.println ( „Program and funktion setup start“ );
#endif
pinMode ( LED, OUTPUT );
digitalWrite ( LED, HIGH );
// Setup the serial communication
FntSerial.clear();
GpsSerial.clear();
// Answer first ‚C‘ with ‚\n‘
// Wait 5sec for ‚C‘ to response
unsigned long ulMillis = millis() + 5000;
while ( millis() < ulMillis )
{
if ( FntSerial.available() )
{
if ( FntSerial.read() == ‚C‘ )
{
FntSerial.println ();
break;
}
}
}
// Wait for init string ‚#FNR MSG,1,initialized‘
// Comes only when booting after power on or BOOT toggle
ReadStartup ();
// ToDo: check it …
// Check for correct version
FntSerial.println ( „#DGV“ );
ReadStartup ();
// ToDo: check it …
// Get module addr
FntSerial.println ( „#FNA“ );
ReadStartup ();
// Only for information
// Check FLARM expiration
FntSerial.println ( „#FAX“ );
ReadStartup ();
// ToDo: check it and update if expired …
// Configure APP PG, online tracking
FntSerial.println ( „#FNC 1,1“ );
ReadStartup ();
// Enable receiver FANET
FntSerial.println ( „#DGP 1“ );
ReadStartup ();
// Enable receiver FLARM
FntSerial.println ( „#FAP 1“ );
ReadStartup ();
FntIdx = 0;
#ifdef DEBUG
UsbSerial.println ( „Function loop should start ;-)“ );
#endif
}
/*
* Toggle state of inbuild LED
*/
byte bGpsLED = 0;
void ToggleLED ( void )
{
if ( bGpsLED )
{
digitalWrite ( LED, LOW );
}
else
{
digitalWrite ( LED, HIGH );
}
bGpsLED = ! bGpsLED;
}
/*
* Read lat or lon inside of an NMEA sequence
* in the funny NMEA counter format
*/
double GetPos ( char *pStr, byte bLen )
{
char cDeg[4];
byte bI;
for ( bI=0; bI<bLen; bI++ )
{
if ( pStr[bI] == 0 ) return ( 0.0 );
cDeg[bI] = pStr[bI];
}
cDeg[bI] = 0;
double dDeg = atof ( cDeg );
double dMin = atof ( pStr + bLen );
return ( dDeg + dMin / 60.0 );
}
/*
* Some global variables
*/
float fHight = 0, fClimb, fSpeed, fCourse;
double dLat, dLon;
int iTime, iDate;
byte bFix = 0, bVal = 0;
static const char Hex[] = „0123456789ABCDEF“;
/*
* Function to handle the GPS serial communication
*/
char GpsBuf[256];
byte GpsIdx = 0;
byte bPosCnt = 0;
void HandleGps ()
{
GpsBuf[GpsIdx] = GpsSerial.read();
if ( GpsBuf[GpsIdx] == 13 )
{
if ( GpsIdx > 3 )
{
if ( GpsBuf[GpsIdx-3] != ‚*‘ ) return; // Wrong format!
byte bI, CRC = 0; // Calculate the CRC and check
for ( bI=1; bI<(GpsIdx-3); bI++ ) CRC = CRC ^ GpsBuf[bI] ;
if ( GpsBuf[GpsIdx-2] != Hex[(CRC & 0xf0) >> 4] ||
GpsBuf[GpsIdx-1] != Hex[(CRC & 0x0f)] ) return;
#ifdef DEBUG_GPS
GpsBuf[GpsIdx] = 0;
UsbSerial.println ( GpsBuf );
#endif
byte bCmd = 0;
for ( bI=0; bI<2; bI++ )
{
char cCmd[] = { „GPGGA,GPRMC,“ };
byte bK;
for ( bK=0; bK<6; bK++ )
{
if ( GpsBuf[bK+1] != cCmd[bI*6+bK] ) break;
}
if ( bK == 6 )
{
bCmd = bI * 20 + 20;
break;
}
}
if ( bCmd )
{
// Now the original NMEA string from GPS could send to a KOBO …
// We had to interpret the string to send infos to the FANET modul
byte bStart = 7;
byte bParam = 0;
for ( bI=bStart; bI<(GpsIdx-2); bI++ )
{
if ( GpsBuf[bI] == ‚,‘ || GpsBuf[bI] == ‚*‘ )
{
GpsBuf[bI] = 0;
bParam++;
switch ( bCmd + bParam )
{
case 21: iTime = atoi ( GpsBuf + bStart );
#ifdef DEBUG_GPS
UsbSerial.print ( „Time “ );
UsbSerial.println ( iTime );
#endif
break;
case 42: if ( GpsBuf[bStart] == ‚A‘ )
{
bVal = 1;
}
else
{
bVal = 0;
}
break;
case 22:
case 43: dLat = GetPos ( GpsBuf + bStart, 2 );
#ifdef DEBUG_GPS
UsbSerial.print ( „Lat “ );
UsbSerial.println ( dLat, 4 );
#endif
break;
case 23:
case 44: if ( GpsBuf[bStart] == ‚S‘ ) dLat *= -1.0;
break;
case 24:
case 45: dLon = GetPos ( GpsBuf + bStart, 3 );
#ifdef DEBUG_GPS
UsbSerial.print ( „Lon “ );
UsbSerial.println ( dLon, 4 );
#endif
break;
case 25:
case 46: if ( GpsBuf[bStart] == ‚W‘ ) dLon *= -1.0;
break;
case 26: bFix = atoi ( GpsBuf + bStart );
#ifdef DEBUG_GPS
UsbSerial.print ( „Fix “ );
UsbSerial.println ( bFix );
#endif
break;
case 29: {
float fHgt = atof ( GpsBuf + bStart );
fClimb = fHgt – fHight;
fHight = fHgt;
}
#ifdef DEBUG_GPS
UsbSerial.print ( „Hight “ );
UsbSerial.println ( fHight, 1 );
UsbSerial.print ( „Climb “ );
UsbSerial.println ( fClimb, 1 );
#endif
break;
case 47: fSpeed = atof ( GpsBuf + bStart ) * 1.852;
#ifdef DEBUG_GPS
UsbSerial.print ( „Speed “ );
UsbSerial.println ( fSpeed, 2 );
#endif
break;
case 48: fCourse = atof ( GpsBuf + bStart );
#ifdef DEBUG_GPS
UsbSerial.print ( „Course “ );
UsbSerial.println ( fCourse, 2 );
#endif
break;
case 49: iDate = atoi ( GpsBuf + bStart );
#ifdef DEBUG_GPS
UsbSerial.print ( „Date “ );
UsbSerial.println ( iDate );
#endif
break;
#ifdef DEBUG_GPS
default: UsbSerial.print ( bCmd + bParam );
UsbSerial.print ( „-“ );
UsbSerial.println ( GpsBuf+bStart );
#endif
}
if ( bParam > 9 ) break; // No more interesting params …
bStart = bI + 1;
}
}
if ( bCmd == 20 && bFix && bVal )
{
ToggleLED ();
if ( bPosCnt < POS_DELAY )
{
bPosCnt ++;
}
else
{
#ifdef DEBUG_GPS
UsbSerial.print ( „GPS Lat “ );
UsbSerial.print ( dLat, 4 );
UsbSerial.print ( “ Lon “ );
UsbSerial.print ( dLon, 4 );
UsbSerial.print ( “ Hight “ );
UsbSerial.print ( fHight, 1 );
UsbSerial.print ( “ Speed “ );
UsbSerial.print ( fSpeed, 2 );
UsbSerial.print ( “ Climb “ );
UsbSerial.print ( fClimb, 2 );
UsbSerial.print ( “ Course “ );
UsbSerial.print ( fCourse, 2 );
UsbSerial.print ( “ Date “ );
UsbSerial.print ( iDate );
UsbSerial.print ( “ Time “ );
UsbSerial.println ( iTime );
#endif
int iDay = iDate / 10000;
int iMonth = iDate / 100 – iDay * 100;
int iYear = iDate – iDay * 10000 – iMonth * 100;
int iHour = iTime / 10000;
int iMin = iTime / 100 – iHour * 100;
int iSec = iTime – iHour * 10000 – iMin * 100;
// examplel FANET string ‚#FNS 45.1234,10.5678,500,37,-1.5,45,117,9,30,12,35,2\n‘
// ‚#FNS lat,lon,alt,speed,climb,heading,year,month,day,hour,min,sec,turn\n‘
FntSerial.print ( „#FNS “ );
FntSerial.print ( dLat, 4 );
FntSerial.print ( „,“ );
FntSerial.print ( dLon, 4 );
FntSerial.print ( „,“ );
FntSerial.print ( fHight, 0 );
FntSerial.print ( „,“ );
FntSerial.print ( fSpeed, 0 );
FntSerial.print ( „,“ );
FntSerial.print ( fClimb, 0 );
FntSerial.print ( „,“ );
FntSerial.print ( fCourse, 0 );
FntSerial.print ( „,“ );
FntSerial.print ( iYear + 100 );
FntSerial.print ( „,“ );
FntSerial.print ( iMonth );
FntSerial.print ( „,“ );
FntSerial.print ( iDay );
FntSerial.print ( „,“ );
FntSerial.print ( iHour );
FntSerial.print ( „,“ );
FntSerial.print ( iMin );
FntSerial.print ( „,“ );
FntSerial.print ( iSec );
FntSerial.println ();
}
}
}
}
GpsIdx = 0;
}
else
{
if ( GpsBuf[0] == ‚$‘ ) GpsIdx++;
if ( GpsIdx > 255 ) GpsIdx = 0;
}
}
/*
* My own hexstr value reader
*/
int ReadHex ( char *szHex, byte bMax )
{
int iVal = 0;
byte bI;
for ( bI=0; bI<bMax; bI++ )
{
byte bByte = szHex[bI];
if ( ! bByte ) break;
// transform hex character to the 4bit equivalent number, using the ascii table indexes
if ( bByte >= ‚0‘ && bByte <= ‚9‘ ) bByte = bByte – ‚0‘;
else if ( bByte >= ‚a‘ && bByte <= ‚f‘ ) bByte = bByte – ‚a‘ + 10;
else if ( bByte >= ‚A‘ && bByte <= ‚F‘ ) bByte = bByte – ‚A‘ + 10;
// shift 4 to make space for new digit, and add the 4 bits of the new digit
iVal = ( iVal << 4 ) | bByte;
}
return iVal;
}
/*
* 3 byte little endian
*/
int ReadHexLE ( char *szHex )
{
int iVal = 0;
byte bI;
szHex += 4;
for ( bI=0; bI<3; bI++ )
{
iVal = ( iVal << 8 ) | ReadHex ( szHex – bI * 2, 2 );
}
if ( iVal & 0x800000 ) return – ( iVal & 0x7FFFFF );
return iVal;
}
/*
* Function to handle the FANET serial communication
*/
void HandleFnt ()
{
FntBuf[FntIdx] = FntSerial.read();
if ( FntBuf[FntIdx] == 10 )
{
char cCmd[] = { „FNF “ };
byte bI, bK;
char szMf[5], szId[5];
byte bTyp = 0, bLen;
for ( bK=0; bK<4; bK++ )
{
if ( FntBuf[bK+1] != cCmd[bK] ) break;
}
if ( bK == 4 )
{
#ifdef DEBUG_FNT
FntBuf[FntIdx] = 0;
UsbSerial.print ( „FANET ‚“ );
UsbSerial.print ( FntBuf );
UsbSerial.println ( „‚“ );
#endif
byte bStart = 5;
byte bParam = 0;
for ( bI=bStart; bI<(FntIdx+1); bI++ )
{
if ( FntBuf[bI] == ‚,‘ || FntBuf[bI] == 10 )
{
FntBuf[bI] = 0;
bParam++;
switch ( bParam )
{
case 1: strncpy ( szMf, FntBuf + bStart, 4 ); szMf[4] = 0;
break;
case 2: strncpy ( szId, FntBuf + bStart, 4 ); szId[4] = 0;
break;
case 3: // Not yet required
// bBc = ReadHex ( FntBuf + bStart, 2 );
break;
case 4: // Not yet required
// iSig = ReadHex ( FntBuf + bStart, 4 );
break;
case 5: bTyp = ReadHex ( FntBuf + bStart, 2 );
break;
case 6: bLen = ReadHex ( FntBuf + bStart, 2 );
break;
}
bStart = bI + 1;
if ( bParam == 6 )
{
// Here we could place a FLARM emulation send to a KOBO …
// PFLAA,<AlarmLevel>,<RelativeNorth>,<RelativeEast>, <RelativeVertical>,<IDType>,<ID>,<Track>,<TurnRate>,<GroundSpeed>, <ClimbRate>,<AcftType>
// or print a logging info to the USB serial port 😉
switch ( bTyp )
{
case 1:
{
if ( bLen != 11 )
{
UsbSerial.println ( „Tracking with wrong data info!“ );
break;
}
double dLat = ReadHexLE ( FntBuf + bStart ) / 93206.0;
double dLon = ReadHexLE ( FntBuf + bStart + 6 ) / 46603.0;
int iBuffer = ReadHex ( FntBuf + bStart + 12, 2 ) | ( ReadHex ( FntBuf + bStart + 14, 2 ) << 8 );
byte bType = ( iBuffer >> 12 ) & 7;
UsbSerial.print ( „Tracking from “ );
switch ( bType )
{
case 1: UsbSerial.print ( „Paraglider “ ); break;
case 2: UsbSerial.print ( „Hangglider “ ); break;
case 3: UsbSerial.print ( „Balloon “ ); break;
case 4: UsbSerial.print ( „Glider “ ); break;
case 5: UsbSerial.print ( „Powered Aircraft “ ); break;
case 6: UsbSerial.print ( „Helicopter “ ); break;
case 7: UsbSerial.print ( „UAV “ ); break;
default: UsbSerial.print ( „??? “ );
}
UsbSerial.print ( szMf );
UsbSerial.print ( „:“ );
UsbSerial.print ( szId );
UsbSerial.print ( “ at Pos “ );
UsbSerial.print ( dLat, 4 );
UsbSerial.print ( “ “ );
UsbSerial.println ( dLon, 4 );
break;
}
case 2:
{
UsbSerial.print ( „Name from “ );
UsbSerial.print ( szMf );
UsbSerial.print ( „:“ );
UsbSerial.print ( szId );
UsbSerial.print ( “ ‚“ );
byte bL;
char szStr[128];
for ( bL=0; bL<min(bLen,128); bL++)
{
szStr[bL] = ReadHex ( FntBuf + bStart + bL * 2, 2 );
}
szStr[bL] = 0;
UsbSerial.print ( szStr );
UsbSerial.println ( „‚“ );
break;
}
case 3:
{
UsbSerial.print ( „Message from “ );
UsbSerial.print ( szMf );
UsbSerial.print ( „:“ );
UsbSerial.print ( szId );
UsbSerial.print ( “ ‚“ );
byte bL;
char szStr[128];
for ( bL=1; bL<min(bLen,128); bL++)
{
szStr[bL-1] = ReadHex ( FntBuf + bStart + bL * 2, 2 );
}
szStr[bL-1] = 0;
UsbSerial.print ( szStr );
UsbSerial.println ( „‚“ );
break;
}
}
break; // End of reading
}
}
}
}
FntIdx = 0;
}
else
{
if ( FntBuf[0] == ‚#‘ ) FntIdx++;
if ( FntIdx > 255 ) FntIdx = 0;
}
}
/*
* Endless loop …
*/
void loop ()
{
if ( FntSerial.available() ) HandleFnt ();
if ( GpsSerial.available() ) HandleGps ();
}
Dieser Quellcode kann als Grundlage eigener Entwicklungen genutzt werden.
Im Falle der Verwendung erwarte ich aber einen entsprechenden Hinweis auf meine Quellen.
Der Quellcode ist in einem Testzustand und ggf. nicht vollständig fehlertolerant, so dass hier Ergänzungen notwendig sind. Dies gilt speziell für den Einsatz mit negativen Geokoordinaten, welches ich (leider) nicht testen konnte.
Folgendes wurde mit diesem Quellcode bereits umgesetzt
- Das FANET+ Modul mit FLARM wird initialisiert als FANET+ Sender, Empfänger und für FANET+ Hopping, sowie das FLARM Modul aktiviert
- Die NMEA Datensätze des GPS Moduls werden gelesen und ausgewertet
Immer wenn ein vollständiger Datensatz empfangen wurde wird dieser an das FANET+ Modul übertragen (notwendig für die korrekte Funktion des Moduls) - Die FANET Datensätze des FANET+ Moduls werden decodiert und „leserlich“ auf der seriellen USB Schnittstelle ausgegeben (serieller Monitor)
Das sieht dann als Ausgabe auf dem seriellen Monitor der Arduino Entwicklungsumgebung folgendermaßen aus
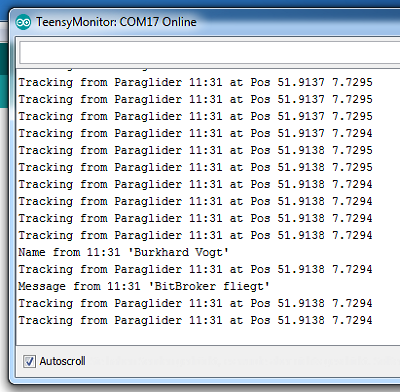
Loggingdaten der Testanwendung
Es werden die Trackinginformationen meines SKYTRAXX 3.0 angezeigt (nicht die Koordinaten des FANET+ Moduls!)
Sollten mehrere Luftfahrzeuge emfangen werden sollten diese alle gelistet werden.
Zwischendurch wird etwa alle 60sek der im SKYTRAXX hinterlegte Pilotenname übertragen.
Zusätzlich habe ich auch vom SKYTRAXX 3.0 noch eine Meldung ‚BitBroker fliegt‘ per FANET gesendet.
Diese wird ebenfall als Meldung ausgegeben.

Ansicht auf dem SKYTRAXX 3.0 auf der Karte
In dieser Darstellung wird mein Testaufbau aus FANET+ Modul, GPS Modul und TEENSY-LC links meiner eigenen Position als Paraglider dargestellt mit Angabe der Höhe von 37m.

Ansicht der FANET Benutzerliste
Hier die Anzeige der aktuell sichtbaren bzw. empfangenen FANET Sender.
In diesem Fall ein SKYTRAXX (Herstellercode 11) FANET+ mit FLARM (f) Unterstützung in 643m Entfernung
Folgendes wurde NICHT umgesetzt bzw. könnte zusätzlich entwickelt werden
- Für FLARM sind regelmäßige Updates erforderlich. Die entsprechende Funktionalität zum Update der FLARM Funktion wurde nicht implementiert, da mir auch die entsprechenden Testdaten nicht zur Verfügung standen.
Hier könnte / müsste ein entsprechendes Funktionsmodul für ein Update über die serielle USB Schnittstelle entwickelt werden. - Ausgabe aller NMEA Datensätze des GPS Moduls, sowie neu generierter $PFLAA FLARM Datensätze über die 3. serielle Schnittstelle des TEENSY an z.B. einen KOBO.
Aufbau wäre dann folgender:
Zwischen die Verbindung Vario mit GPS (z.B. BlueFlyVario oder BlueToothModul im KOBO mit XC-Tracer) wird der TEENSY „eingeschleift“. Eingang als GPS ist das vorhandene Vario System, zusätzlich wird das FANET+ Modul mit FLARM verwendet und eine entsprechende Antenne verbaut. Spannungsversorgung ist direkt über den KOBO möglich.
Durch Einbindung der $PFLAA FLARM Datensätze in den vorhandenen NMEA Datenstrom des Varios werden XCSoar diese Informationen dann zur Verfügung gestellt.
Zu beachten ist dabei aber, dass XCSoar nur FLARM Daten(sätze) verarbeiten kann und daher auch diese Informationen immer als FLARM Geräte visualisiert! In Wirklichkeit handelt es sich dann aber um andere Luftfahrzeuge mit FANET oder AirWhere Modulen welche dargestellt werden …
Ich würde mir wünschen, dass FANET zukünftig auch von XCSoar unterstützt wird, so das nicht nur Luftfahrzeuge dargestellt werden können welche mit FANET oder AirWhere Modulen ausgestattet sind, sondern dass auch die ganzen Möglichkeiten von FANET bzw. AirWhere genutzt werden können wie z.B. „Nachrichten senden / anzeigen“, BuddyListen anlegen, Informationen von Bodenstationen und Wetterdaten verarbeiten usw.